
































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
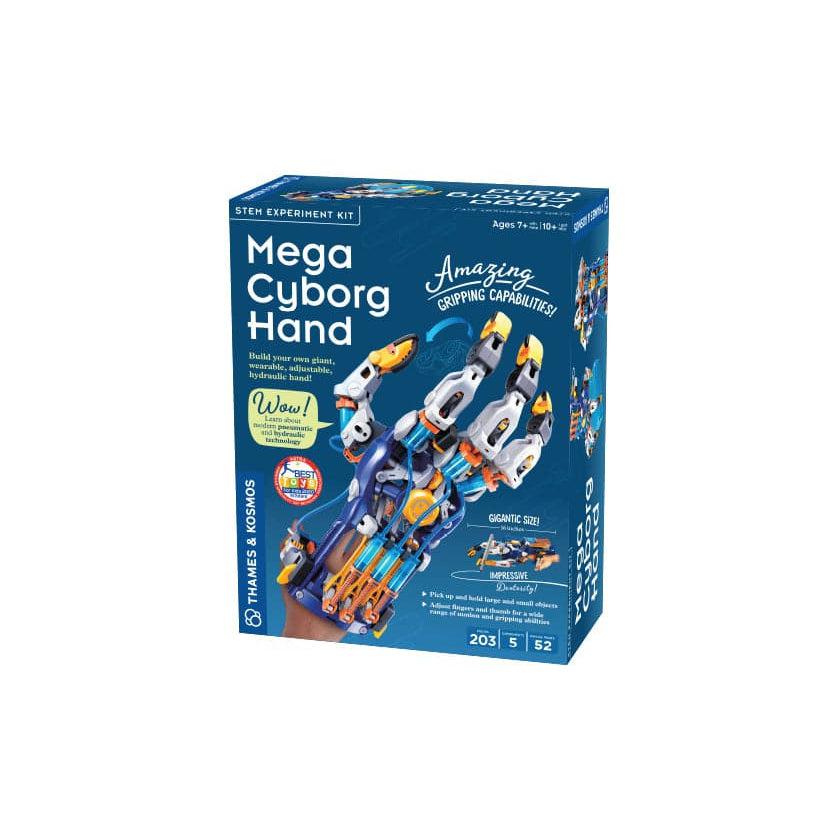
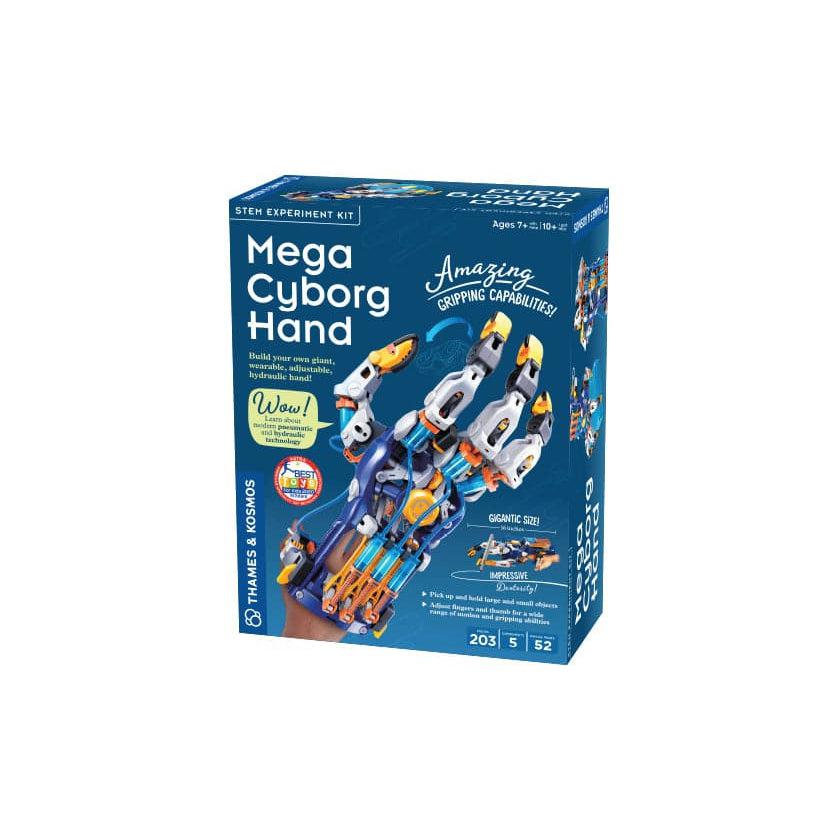
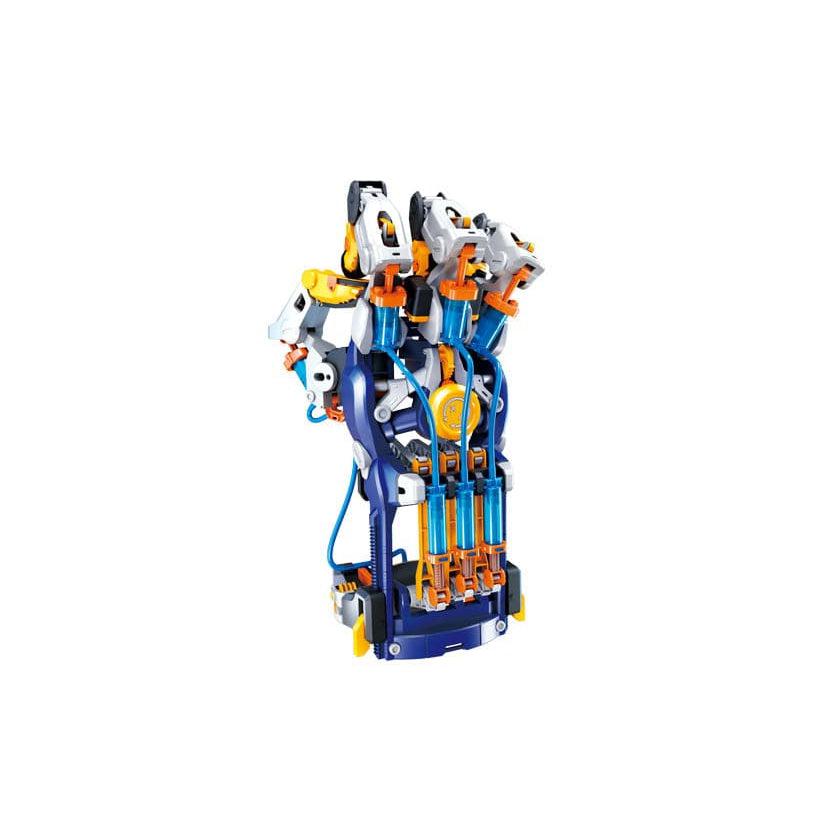
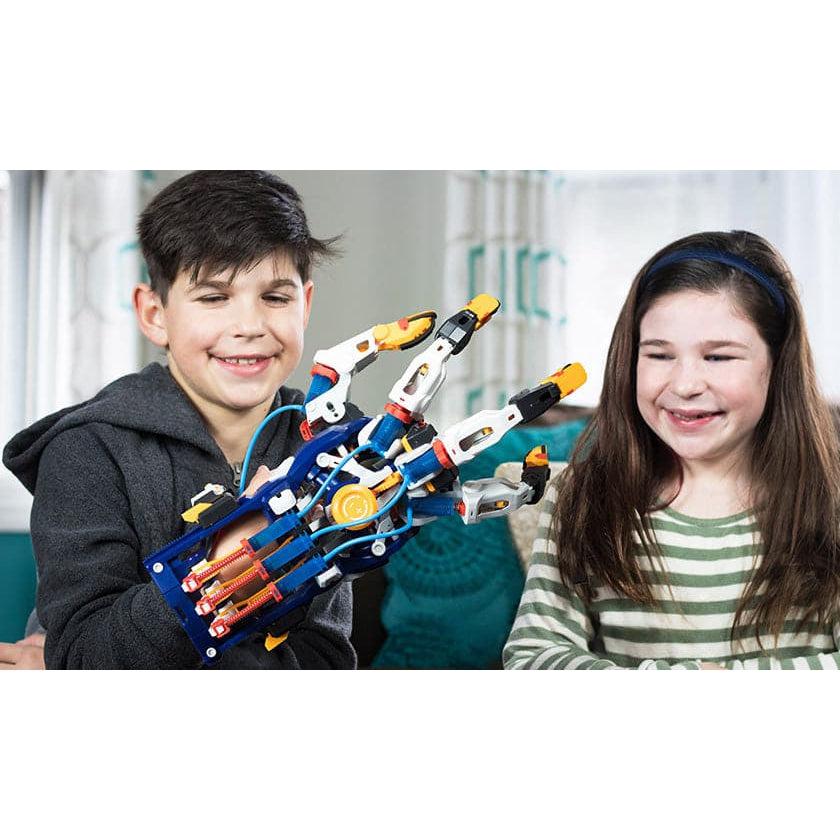
Build your own BIG hydraulic hand, slip your hand into it like a glove, and operate the mechanical fingers with your own fingers. Assemble the cyborg hand using over 200 plastic pieces, fill the piston tubes with water, and adjust it to fit your own hand. The hydraulic pistons enable the fingers to open and close, and to grip objects with enough force to lift them. The hand can be configured in three ways by changing the position of the thumb: left hand, right hand, and claw-like (with the thumb in the center).
The mechanical hand simulates the movements of the human hand, using hydraulic power for energy transmission without motors or electricity. The hand allows every finger joint to adjust to different angles for precision movement. Challenge yourself to configure the hand to grip various items like bottles, balls, pencils, small items — anything within reach! The cyborg hand is adjustable to fit virtually all hand sizes.
Learn how pneumatic and hydraulic systems are used in industrial robots to enable the robots to manipulate heavy objects, such as automobile components. A 40-page, full-color manual guides you through model building with step-by-step illustrated instructions.